

Le puissance 4….un grand classique de notre enfance et un projet qui a muri presque 3 ans !
Tout a commencé en 2011 quand j’ai fais l’acquisition d’un bras robotisé piloté par une carte lynxmotion SSC-32. Cette carte à la particularité d’accepter en entrée un ensemble de commandes textuelles via un port série, et en sortie de piloter jusqu’à 32 servomoteurs (type modélisme). Le commandes sont très simples et prennent la forme suivante:
par exemple pour déplacer le servo n°2 à la position 750 (0.75ms soit 45°), il suffit de passer le séquence suivante « #2 P750 T1000 » (T<duree> représente le temps en ms que le servo prendra pour effectuer le mouvement). un peu de théorie sur la commande des servomoteurs: ici
De son coté, le bras est constitué d’un ensemble de 6 servos, il comprend une épaule (2 axes), un avant bras (1 axe), un bras un poignet (1 axe), et une pince (1 axe).
Mon premier projet était de faire commander le bras par ma réplique d’Apple I, et de laisser cette antique bécane gérer la logique des mouvements et l’IA. Bon, c’était sans compter sur sa terrifiante puissance de calcul à 1mhz. Sachant que je suis une tanche en assembleur, le programme devait tourner en basic, donc en interprété….résultat très décevant: juste pour l’IA il fallait de 1 à 3 min pour déterminer le coup à jouer.
Néanmoins, en faisant tourner le programme sur mon macbook, on pouvait obtenir ceci:
Avec un embryon de plateau de jeu réalisé avec des glissières en alu….
Ok, ce n’est pas l’idéal…. il était temps de réfléchir à quelque chose de plus « pro » qui utilise le vrai plateau de jeu d’un puissance 4, d’un distributeur de jeton (en prenant en compte le coté « rugueux » des jetons d’origine). Bref, du boulot en perspective….et puis d’autre projets sont apparus (domotique, radio, machine inutile + plein d’autres choses….).
2 ans et demi plus tard, après quelques tentatives infructueuses, j’ai décidé de reprendre le projet de zéro:
1) utiliser un plateau de jeu d’origine
La seule solution a été de surélever considérablement le bras pour que celui-ci domine le plateau et qu’il puisse déposer convenablement les jetons dans chacune des têtes de colonne. Solution mise en pratique par l’utilisation de pieds de table en acier de chez « Lee Roy Mèreline »

2) les jetons et les distributeurs de jetons
Concernant les jetons, j’ai rapidement abandonné ceux d’origine pour un ensemble de cylindre que j’ai fait découper au laser dans le l’acrylique de 5mm d’épaisseur (formulor.de).
Le gros avantage réside dans le fait de pouvoir, dans une pile, faire glisser sans difficultés le jeton du bas sans frottement (pour peu que la dite pile soit maintenue bien évidement). Le distributeur pouvant, dans ce cas, prendre simplement la forme d’un parallélépipède vertical contenant la pile et possédant une ouverture en bas suffisante pour en saisir un.
Ce qui donne:
3) L’électronique
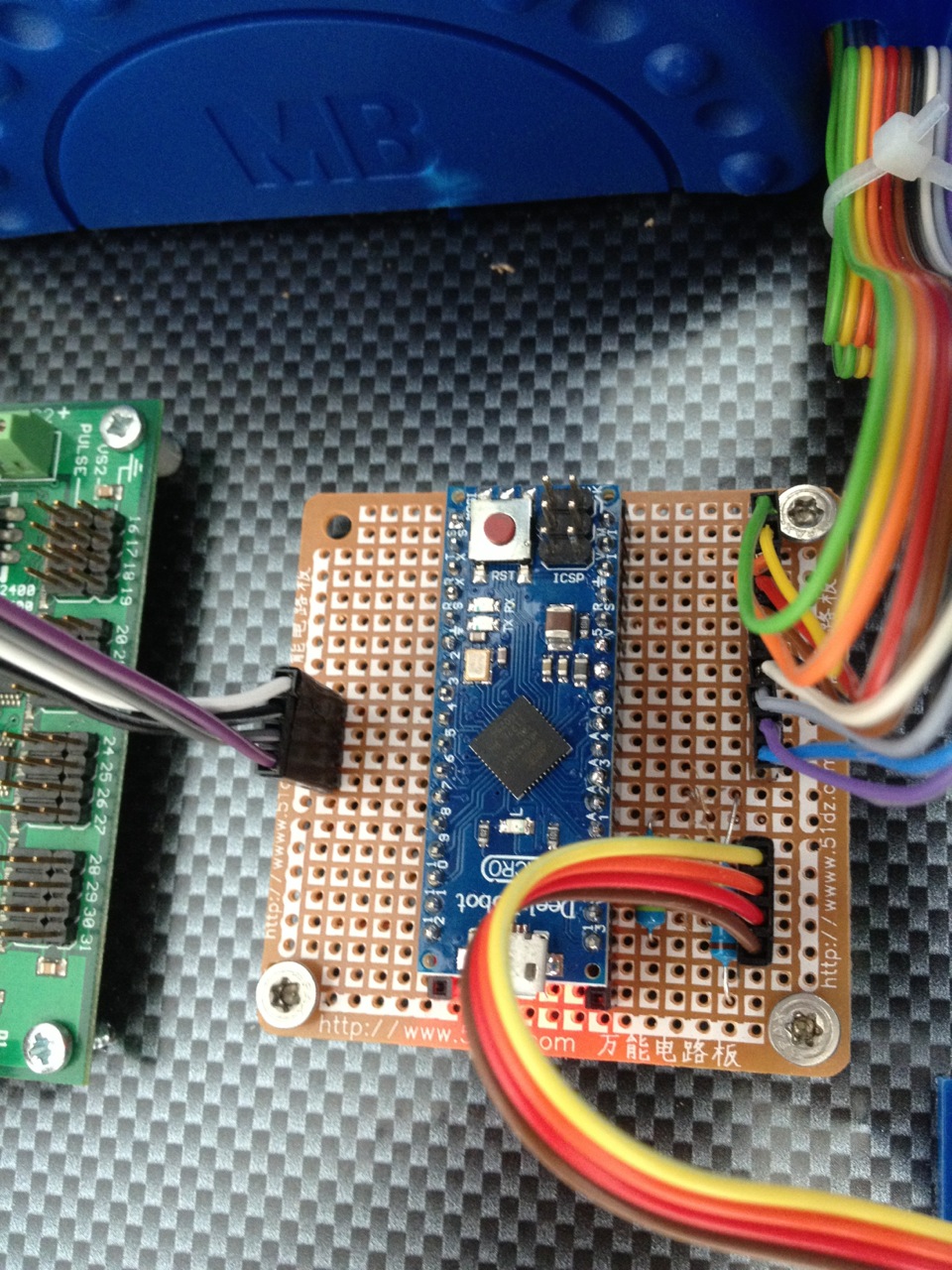
Ayant pris un peu d’assurance avec les arduino’s, j’ai abandonné interfaçage avec mon « Apple I » et je suis parti sur une solution à base de « micro » (toujours pour son coté compacte). L’arduino micro étant comme tous ses grands frères très à l’aise pour communiquer sur un port série, il n’y avait donc aucun soucis à piloter la carte SSC-32 avec cette solution.
3) L’IHM
Interaction minimaliste mais fonctionnelle au maximum…donc un afficheur LCD 4×20 (sur bus I2c) pour indiquer les phases du jeu, et un ensemble « LED + bouton poussoir » au pied de chaque colonne numérotée de 1 à 7.
Pour intégrer le tout, je me suis à nouveau appuyé sur les possibilités offertes par formulor.de, j’ai donc dessiné et fait découper un assemblage de plaques d’acrylique de 3mm qui forment un réceptacle à jetons sous le plateau et qui se termine en console abritant les boutons et les leds, coté joueur. Les LEDs sont pilotées chacune individuellement par une sortie numérique. Les boutons poussoirs, pour leur part, sont montés sur des ponts diviseurs de tension et reliés en sortie à une unique entrée analogique de l’arduino (pour faire simple bouton1=0.5V, bouton2=1V, bouton3=1.5V, etc..)

une petite démonstration par la pratique??
une partie gagnée
comme d’hab, un petit lien vers le source hébergé sur GitHub: https://github.com/Chnalex/arduino/blob/master/puissance4.ino