QuBéTank ? kesako ?
– « Qu » comme Quentin
– « Tank » comme tank lol
– « QuBéTank » comme cubetto Certes…mais cela ne nous avance pas beaucoup….
Tout a commencé il y a un peu plus d’un an en découvrant le projet d’une petite startup (Primo) qui a réalisé un outil éducatif (cubetto) permettant d’apprendre aux enfants de 3 ans (et plus) la logique de programmation d’une séquence d’actions sur un pupitre. Séquence, qui ensuite est transmise sans fil à un petit robot en forme de cube qui se déplace ensuite en conséquence. Ce concept pour ceux, comme moi, dont l’entrée dans le monde merveilleux de l’informatique c’est fait par le biais du plan informatique pour tous de Fabius en 1985 (ou inversement, pour ceux qui ont réussi à survivre au plan informatique pour tous 😉 ) , se souviendront du Logo… Ce langage qui à l’époque nous apprenait à déplacer une tortue pour réaliser des dessins (pour ceux qui ne connaissent pas, je recommande le très bon article de wikipedia sur le Logo).
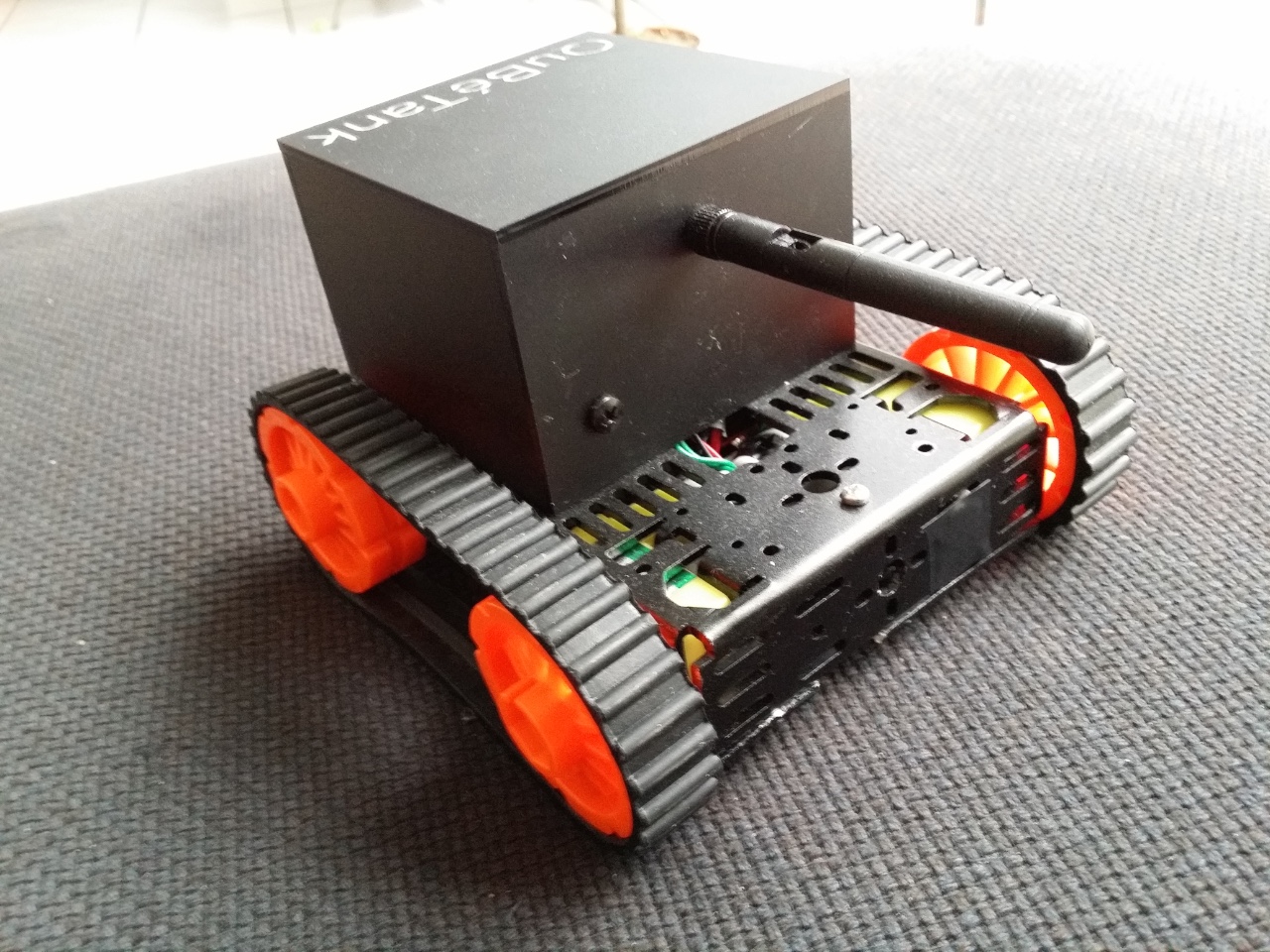
J’ai voulu reprendre le principe du cubetto pour le repenser à ma sauce….Une télécommande avec afficheur LCD enregistre la séquence à réaliser (comme un accumulateur), puis lorsque l’on appuie sur le bouton « départ », la télécommande transmet via un port série sans fil crypté le tout au robot pour exécution. Le petit cube en bois du cubetto a été un peu déstructuré à la demande du futur utilisateur, qui du haut de ses quatre an et demi, a voulu un châssis à chenilles (« et avec un truc pour mettre canon, comme ça, ça fera un tank!!!! »).
Exit donc les petites formes en bois à poser sur des emplacements vides du pupitre, je suis parti d’un boiter plus compact ou les séquences seraient saisies en pressant quatre boutons poussoirs (avant – arrière – gauche – droite), le tout s’affichant sur un écran LCD. Deux autres boutons étant dédiés aux fonctions d’exécution et de remise à zéro de la séquence.

Comme pour mes autres réalisations, j’ai fait découper et graver au laser la plaque de fond du pupitre chez formulor.de

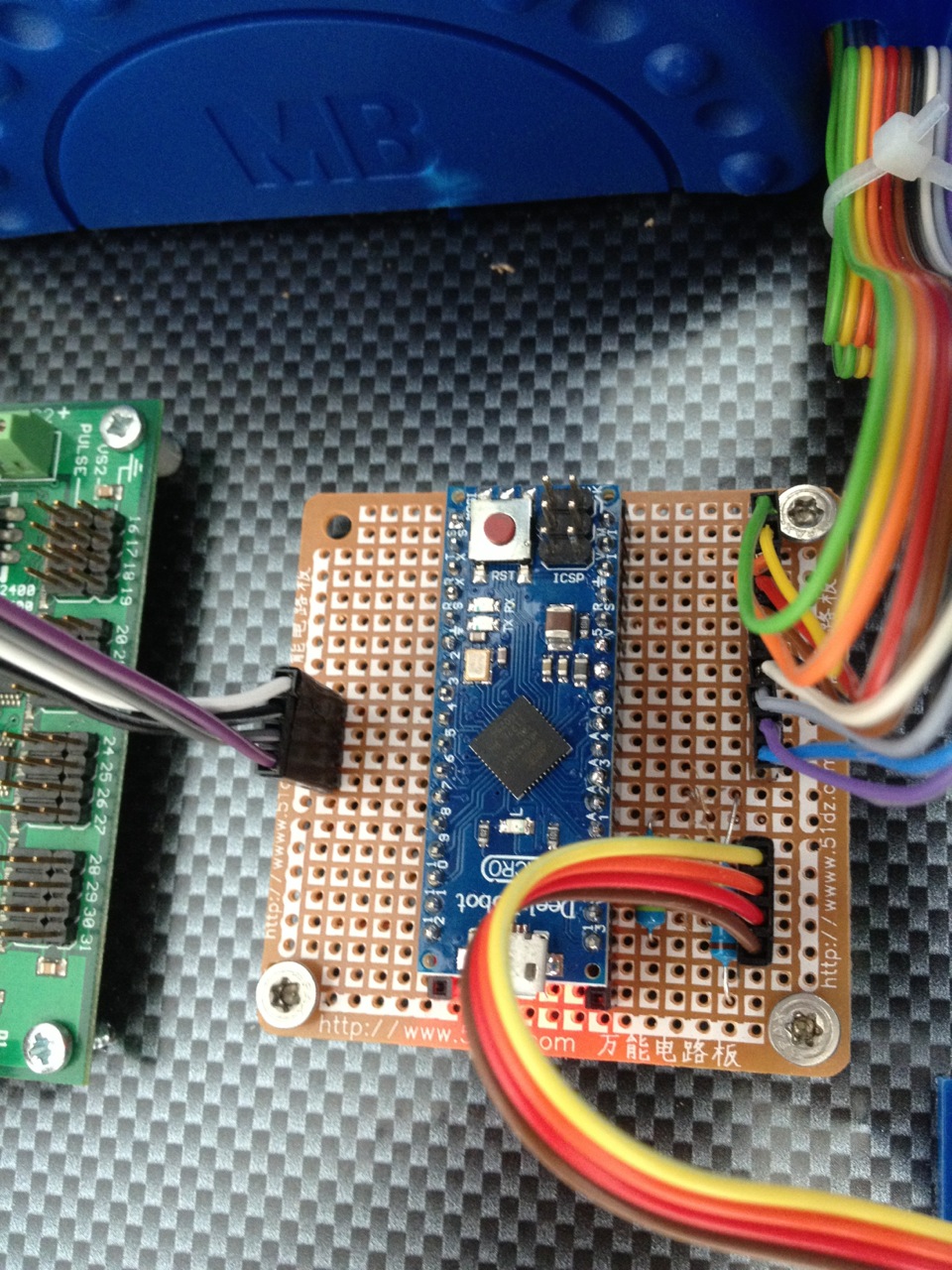
La conception du pupitre est relativement simple et fait appel à un arduino . Mais pour une fois, j’ai voulu faire un peu plus dans le DIY (Do It Yourself), et je me suis appuyé sur une version à monter soi même: le Boarduino (un simple PCB sur lequel on soude les composants de base, puis on plug dessus un ATMEGA 328 avec un bootloader arduino).
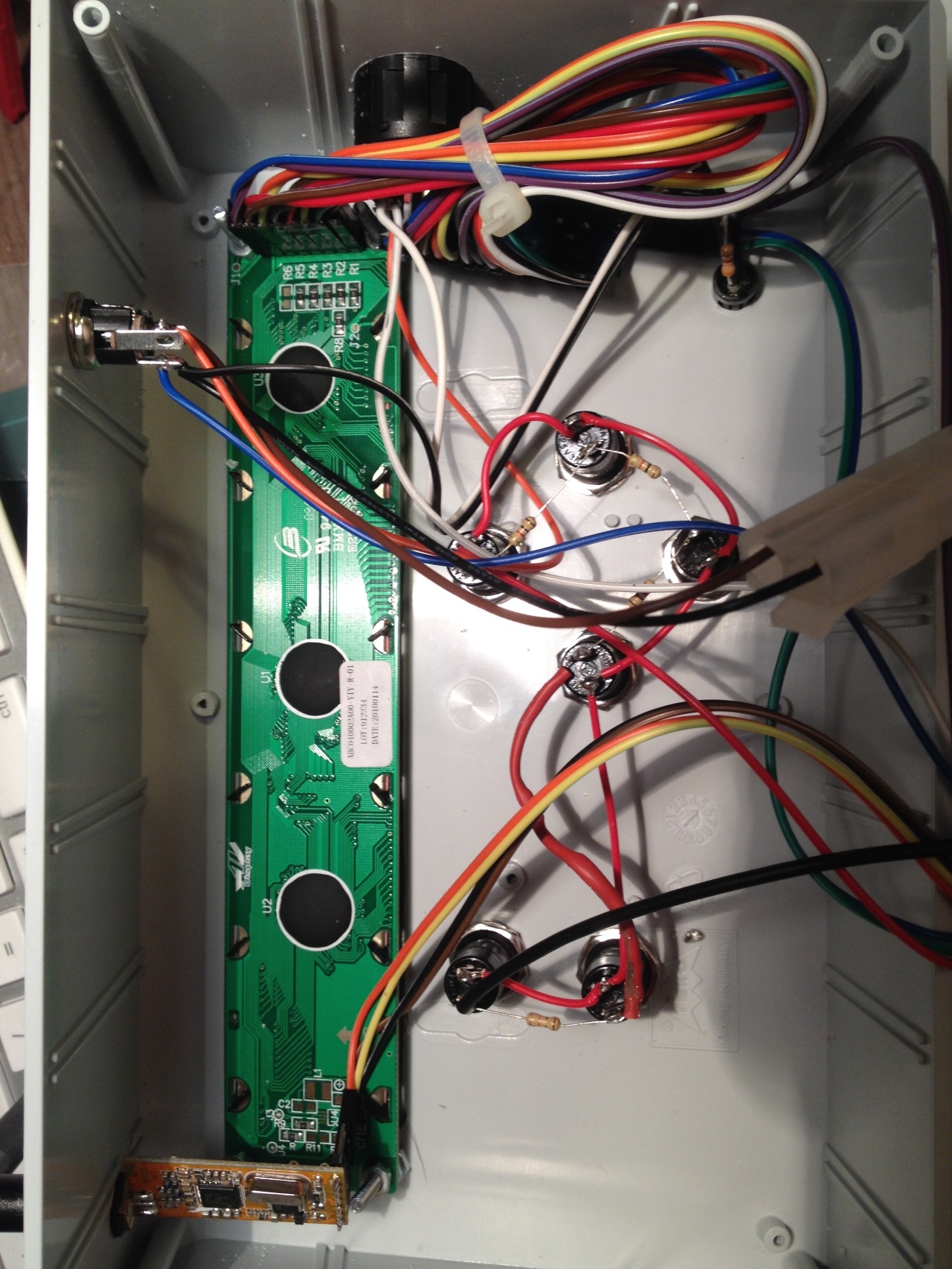
L’ensemble des boutons n’est relié qu’à une seule entrée analogique de l’arduino via un réseau de résistance connecté au +5V (l’appui sur un bouton précis génère une tension de sortie qui lui est propre). L’afficheur lcd 2×40 est piloté via un module lcd/I2C qui est directement relié aux bornes du bus I2C de l’arduino. Pour le port série sans fil, j’ai utilisé un module APC220 dont le branchement est extrêmement simple (un TX et un RX)
Le code source du pupitre hébergé sur github: https://github.com/Chnalex/arduino/blob/master/qubetank%28telecommande%29
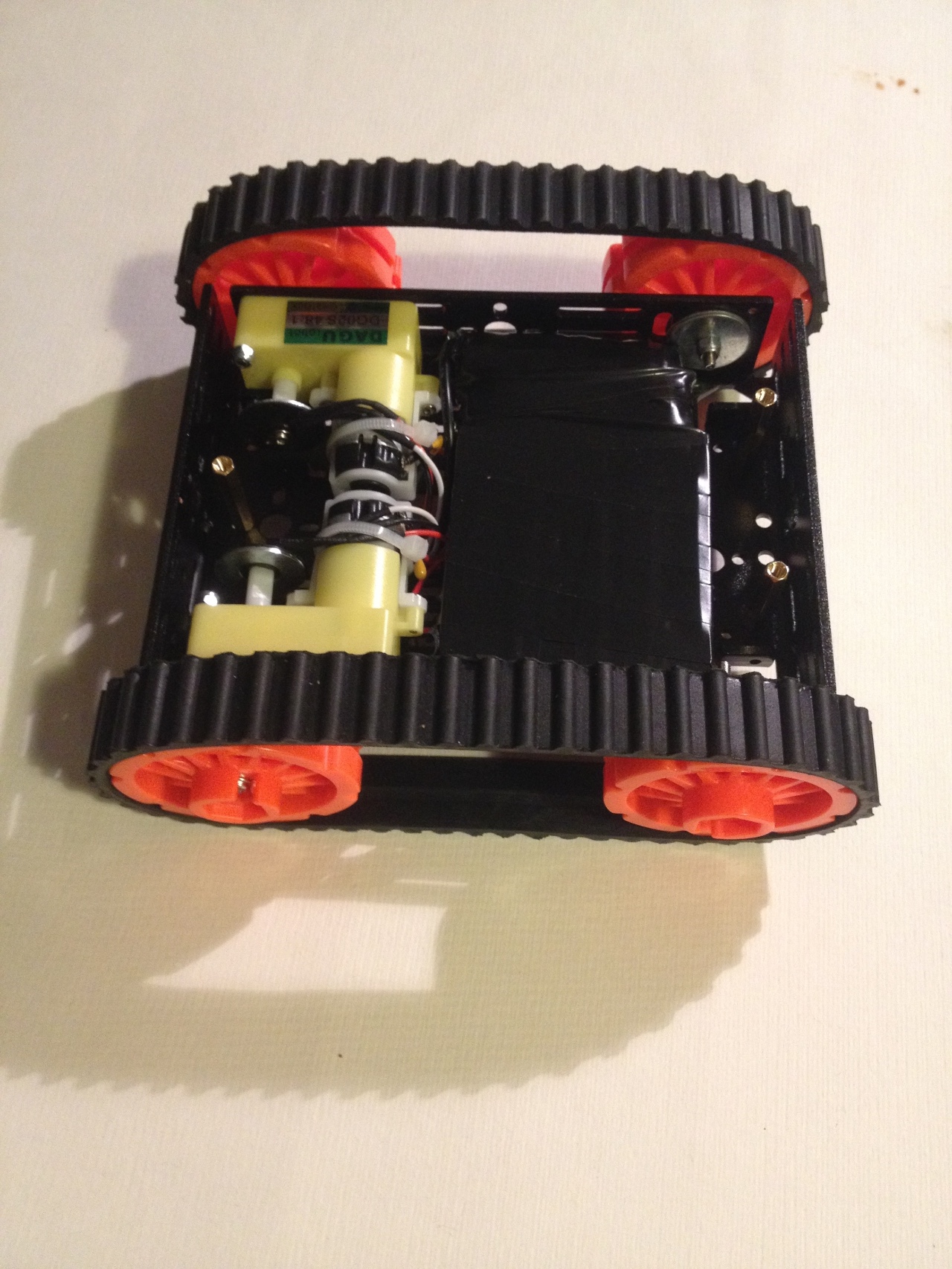
Cadeau de Noël oblige, la partie robot est basée sur un chassis plutôt bien fini acheté chez roboshop. L’ensemble est mu par deux moteurs DC (un par bloc chenille).
Comme pour la partie pupitre, un boarduino relié à un deuxième module APC220 (pour recevoir la séquence envoyée par la télécommande). Et le hasard faisant bien les choses, j’ai pu utiliser l’antenne comme faux canon et satisfaire la demande du mini-commanditaire… Par contre, les arduino n’ayant pas d’étage de puissance capable de piloter les moteurs, j’ai du utiliser un double pont en H relié en amont à l’arduino et en aval aux moteurs, pour réaliser cet asservissement.
Afin d’ajouter un peu de réalisme j’ai utilisé l’une des pattes PWM de l’arduino pour attaquer un transistor connecté à un mini haut parleur, et via la bibliotheque PCM l’arduino joue le son d’un canon (en mono 8bit – 8khz) stocké dans son programme. Bon le son est un peu cracra (8khz comme échantillonnage c’est pas top), mais c’est sympa. Et comme un tank qui tire est soumis à un effet de recul, chaque exécution de séquence se termine donc par le bruit du canon suivi d’un leger recul (marche arriere toute pendant 80ms)
le code source du robot/tank sur gtihub:
https://github.com/Chnalex/arduino/blob/master/qubetank
Et voila comment faire un cadeau de noël éducatif et drôle 😉